
.png)
NITECH
A smart glove that is able to detect Localized Tremors in the hand using an MLP Network and mitigate them using Nitinol as actuator.

.png)
.png)
_edited.png)
_edited_edited.png)
_edited_edited_edite.png)
_edited.png)
_edited.png)
_edited.png)
BACKGROUND
Tremors are classified as an unintentional and uncontrollable rhythmic movement of a body part and the issue generally stems from a problem with the are of the brain that controls movement. Illnesses where symptoms of tremors are mainly evident usually fall under either Essential Tremor Disorder or Parkinson's Disease. For such individuals diagnosed with either disease, their quality of life can be drastically impacted as hand tremors inhibit them from carrying out normal day to day activities such as holding a glass of water and many others. There are several types of tremors that can affect individuals control such as postural tremors or kinetic tremors that arise during active use, to resting tremors commonly seen in Parkinson’s patients that cause tremors while the limbs are at rest, however Parkinsonian tremors tend to have a frequency between 2.5-6.8hz which allows us to have a metric that can identify them.
The current options for treating Parkinson's are either invasive (such as DBS Surgery) or other non-invasive options that tend to fall short in terms of either form factor, effectivness or adjutsing to nuances of daily life. The novelty behind this project is stemmed from the un-orthodox use of nitinol to act as a method of providing semi-active resistance and response to external motion, in the case of this project, hand tremors. By using Nitinol, the wearable glove becomes better than other non-invasive options out there in terms of a minimized form factor compared to other solutions and control of the actuation becomes fully electronic allowing for better monitoring of the overall system. However, it can still provide more than enough load to mitigate tremors and possibly help with the rigidity and overall strength of the hand.
PURPOSE
This Project aims to research and develop a wearable smart solution that helps in the mitigation/stabilization of hand tremors using methods such as SME (Shape Memory Effects) or other non-intrusive solutions that can be used for day-to-day operation or high-precision Procedural environments. As a result, a smart, wearable tech is expected to be designed and developed based on the research. One that is non-intrusive yet allows individuals that require higher stability of the hand to achieve mentioned outcome. In essence this glove strives to do two things, one is to identify when a tremor is occurring and secondly to activate at the time of tremor and gently keep the hands steady, almost as if someone was holding your hand.
experimental
This experimental setup aims to do the following things:
- Simulate a tremor in a single plane by converting rotating motion to oscillatory motion
- Track the oscillatory motion by retrieving the Euler angles (using BNO055)
The simulation of the tremor is achieved by using a Brushless Motor along with a Brushless Motor Controller (ODrive) and Rotary Encoder (AMT-102) in order to control the frequency of oscillation. An IMU then sends the data to a Raspberry Pi in order to post process the data retrieved, The Euler data is measured over 1 second with an interval of 005 seconds. The data is then run through a Fourier Transform and the Prevalent frequency is checked in order to concur with the input for the frequency corresponds with the output value.
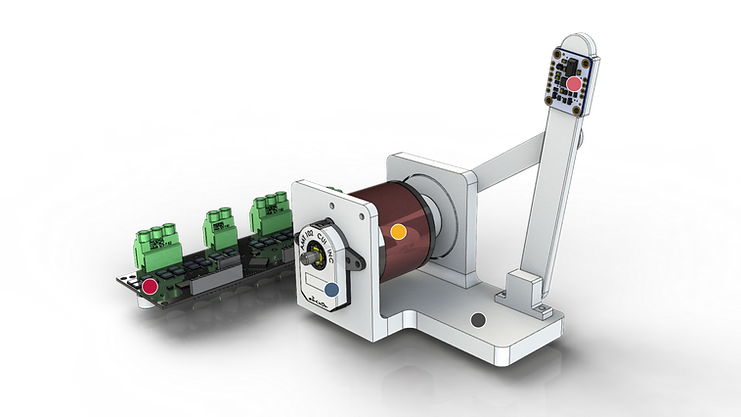.png)
48V ODrive
BNO055 IMU
280kV BLDC Motor
AMT-102 Rotary Encoder
3D-Printed Rig

Animation of the experimental setup used to produce initial test data for training MLP Network

Video showing output received during the experimental phase
DATA ANALYSIS
In order to determine whether a tremor was occurring or not a holistic data flow had to be used in order to accurately ascertain whether movements were caused due to tremors or daily activities. Unwanted inputs such as noise from the IMU and other such frequencies had to be differentiated in order to ensure the user did not experience false positives when using the device. In order to achieve this a Fast Fourier Transform (FFT) and Multi-Layer Perceptron Network was used in tandem with the obtained IMU data. Shifting the Euler data to the frequency spectrum allowed for analysis of specific frequency landscapes for that were characteristic of tremors. By looking at the prevalent frequency, I was able to compare against known frequencies that a Parkinsonian Tremor would experience (2.5-6.8Hz), allowing for measurable indications of a tremor happening.
However using IMU data obtained from the hand produces more noise, and gives us data that may not have one clear prevalent frequency. It also becomes harder to differentiate between hand tremors and non-tremor readings that produce similar frequencies. In order to analyze the data in a more holistic way, the FFT spectrum is passed through a pre-trained MLP Network in order to run feature extraction on specific frequency profiles that relate to tremors. By doing this a accuracy of 99.6% is achieved when testing the trained network, on data obtained from the hand.
Further improvements can be made to results by using positional data from the IMU as well to gain better understanding of tremor characteristics. Tailoring the network to the user overtime through unsupervised learning remains to be a viable option as well provided more time and budget.
.png)
.png)
.png)
Real data obtained during experimental stage
_edited.png)

.png)
Using Tensorflow's built in visualization suite, Tensorboard, the supervised learning of the network could be observed. By looking at the distribution of the weights and biases through each step in the training epoch the neural network was shown to be learning (more info can be found in the provided document below). The number of neurons used for each hidden layers was decided by observing the fastest learning rate and accuracy, through trial and error. The code for both the experimental setup and implementation was run using python language due to easy access to the Tensorflow's library.
NITECH CODE FLOW
.png)
In order to regulate the temperature of the nitinol wire to stay within its transformation temperature (40°C) a PID controller is used. At the transformation temperature the microstructure of the wire moves from a martensite to austenite crystalline phase, allowing it to transform into a pre-programmed shape. At this state it is able to produce a resistance to deformation due to the tensile strength provided at this phase. The method used to heat the wire in this project is Joule heating where a current is applied to the wire, and due to the internal resistance, heat is produced as a result. Therefore it is important to regulate the temperature to both maintain the temperature of the wire slightly above 40°C, but also ensure the wire does not heat up further resulting in discomfort or a potential safety risks to users. In order to ensure safety for the user the software verifies feedback from the Temperature sensor before applying current to the wire. PID controller activates and maintains the temperature at 50°C when MLP network returns true in the time step.

A video showing PID Control of the nitinol wire in order to keep it at the desired temperature.
CONCLUSION
As is stands with the NITECH Glove, a proof of concept has was successfully shown. Identifying tremors using a combination of both FFT and MLP Networks proved to be beneficial and quick in determining whether a tremor was occurring in a given time sample, and was then proven to work during live use. The novelty of using Nitinol provides many benefits to users such as low form factor., minimal weight, low cost and scalability to extend support beyond the hand. As such, given slightly more time and resources the feasibility of NITECH in the medical industry remains to be one that is viable.
For more detailed info refer to document above